نویسنده
انتشار در
خرداد 12, 1404
ایدهی سوارم رباتیک یا رباتیک ازدحامی، مفهومی نوظهور اما ریشهدار در دنیای سیستمهای توزیعشده هوشمند است که الهامگرفته از رفتارهای جمعی موجودات زنده مانند مورچهها، زنبورها، پرندگان و ماهیهاست. این موجودات بهرغم برخورداری از هوش و توان پردازشی محدود، از طریق تعاملات محلی و بدون کنترل مرکزی، قادر به انجام فعالیتهای پیچیده و هدفمند بهصورت گروهی هستند. در سوارم رباتیک، نیز همین منطق به سیستمهایی از رباتهای ساده، مستقل، و تعاملپذیر تعمیم داده میشود؛ رباتهایی که با بهرهگیری از قواعد محلی، رفتارهای جمعی با مقیاسپذیری و پایداری بالا از خود نشان میدهند.
سه ویژگی کلیدی که سوارم رباتیک را از سایر رویکردهای چندرباتی متمایز میکند، عبارتاند از: پایداری در برابر خطا یا حذف عضو (Robustness)، توانایی عملکرد در گروههای کوچکتابزرگ (Scalability) و انعطافپذیری نسبت به تغییر محیط یا مأموریت (Flexibility). این ویژگیها باعث شدهاند تا سوارم رباتیک به گزینهای ایدهآل برای محیطهای پویا، غیرقطعی و پراکنده بدل شود؛ مانند عملیات جستوجو و نجات، نظارت محیطی، یا اتوماسیون انبارداری.
بررسی مقاله مرجع سوارم رباتیک
در مقالهی مرجع Brambilla و همکاران (۲۰۱۳)، سوارم رباتیک نه تنها بهعنوان یک حوزه تحقیقاتی نوآورانه، بلکه بهعنوان یک شاخه مهندسی با چشمانداز عملی تعریف شده است. نویسندگان با تمرکز بر «مهندسی ازدحامی»، تلاش میکنند تا مسیر طراحی، توسعه، تحلیل و پیادهسازی سیستمهای سوارمی را از طریق روشهای سیستماتیک هموار کنند. به بیان دیگر، این مقاله سعی دارد تا سوارم رباتیک را از یک مفهوم الهامگرفته صرف از طبیعت، به یک ابزار مهندسی پیشبینیپذیر، قابل اتکا و قابل پیادهسازی در صنعت تبدیل کند.
در این مسیر، مقاله دو دسته روش طراحی را تشریح میکند: طراحی مبتنی بر رفتار و طراحی خودکار. طراحی مبتنی بر رفتار (Behavior-based Design) به توسعه رفتارهای فردی ساده برای هر ربات متکی است که از طریق تعامل با دیگران، یک رفتار جمعی مطلوب را شکل میدهد. روشهایی مانند ماشین حالت احتمالی یا طراحی بر پایه فیزیک مجازی، از ابزارهای رایج در این رویکرد هستند. در سوی دیگر، طراحی خودکار (Automatic Design) با بهرهگیری از الگوریتمهای یادگیری تقویتی و رباتیک تکاملی، تلاش میکند بدون نیاز به دخالت مستقیم انسان، رفتارهای جمعی پیچیده را بهطور خودکار کشف کند.
در بخش دیگری از مقاله، رفتارهای جمعی کلیدی نظیر تجمع، شکلگیری الگو، حرکت هماهنگ و تخصیص وظیفه بررسی میشوند و نشان داده میشود که چگونه این رفتارها میتوانند به عنوان بلوکهای سازنده در کاربردهای عملی نظیر نقشهبرداری، اکتشاف یا حمل و نقل هوشمند بهکار گرفته شوند. همچنین، مقاله به ابزارهای تحلیلی، مدلسازی و شبیهسازی سیستمهای سوارمی نیز میپردازد و نیاز به چارچوبهای دقیق برای تحلیل و اطمینان از صحت عملکرد آنها را مطرح میکند.
در نهایت این مقاله تأکید میکند که مسیر توسعهی سوارم رباتیک نهتنها از منظر فنی و الگوریتمی، بلکه از منظر مهندسی و صنعتی نیز باید دنبال شود. از آنجا که این سیستمها ویژگیهای کلیدی یک فناوری آیندهنگر یعنی مقیاسپذیری، تحملپذیری، و خودسازماندهی را در خود دارند، میتوانند نقش مهمی در تحول صنایع هوشمند، لجستیک نوین، امنیت مرزی، شناسایی، و سامانههای امدادی ایفا کنند و در ادامه به ارائه چند نمونه مدل سازی انجام شده در حوزه الگوریتمهای رفتار جمعی رباتها ارائه شده است.
شبیه سازی الگوریتمهای رفتار جمعی رباتها
در مدل نخست، یک شبیهسازی با استفاده از الگوریتم هوش ازدحامی “ماهی مصنوعی” (AFSA) پیادهسازی شده است که هدف آن بررسی رفتار گروهی چند ربات در فرآیند جستجو و نزدیکی به یک هدف مشخص در یک محیط سهبعدی میباشد. در این مدل، ابتدا ۱۰ ربات بهصورت تصادفی در فضای مجازی پراکنده میشوند. سپس هر ربات با استفاده از قابلیت حس محیط اطراف (sensing) و ارتباط با رباتهای همجوار (communication) تلاش میکند تا مسیر بهینه برای رسیدن به هدف را پیدا کند. این هدف به صورت یک شیء ثابت در مرکز محیط تعریف شده و با نام “ماهی” مشخص شده است.
الگوریتم به گونهای طراحی شده که هر ربات در هر لحظه اطلاعات محیطی مانند موقعیت خود، موانع احتمالی و موقعیت نسبی سایر رباتها را دریافت میکند و بر اساس قوانین AFSA تصمیم میگیرد که آیا به سمت هدف حرکت کند، در نزدیکی سایر رباتها باقی بماند یا مسیر جدیدی را برای اکتشاف انتخاب کند. این تصمیمگیریها در توابعی پیادهسازی شدهاند که درون کد، مسئول جهتیابی، حفظ فاصله ایمن از سایر رباتها، و حرکت مرحلهبهمرحله در طول شبیهسازی هستند.
ما برای پیادهسازی این رفتارها، کلاسهایی تعریف کردهایم که هر کدام از آنها نمایانگر یک ربات یا یک عامل محیطی مانند هدف یا مانع هستند. برای مثال، هر ربات با استفاده از تابع «برنامهریزی مسیر» میتواند موقعیت فعلی خود را با هدف مقایسه کرده و در راستای کاهش فاصله، با گامهایی محدود حرکت کند. از طرفی دیگر، قابلیت حس کردن شعاعی نیز طوری تعریف شده که رباتها فقط در محدودهی خاصی میتوانند با سایرین ارتباط برقرار کنند یا به وجود هدف پی ببرند.
در طول ۲۰ مرحله اجرای شبیهسازی، مسیر حرکت و موقعیت مکانی هر ربات ثبت شده و خروجیهای تصویری تولید میشوند که امکان تحلیل دقیق رفتار جمعی سیستم را فراهم میسازد. این مدل به ما اجازه میدهد تا الگوریتمهای هوش ازدحامی را در پروژههای عملی از قبیل ناوبری خودکار، جستجوی هدف، یا همکاری چند عامله بررسی و شبیهسازی کنیم که خروجی های این مدل در زیر آورده شده است.
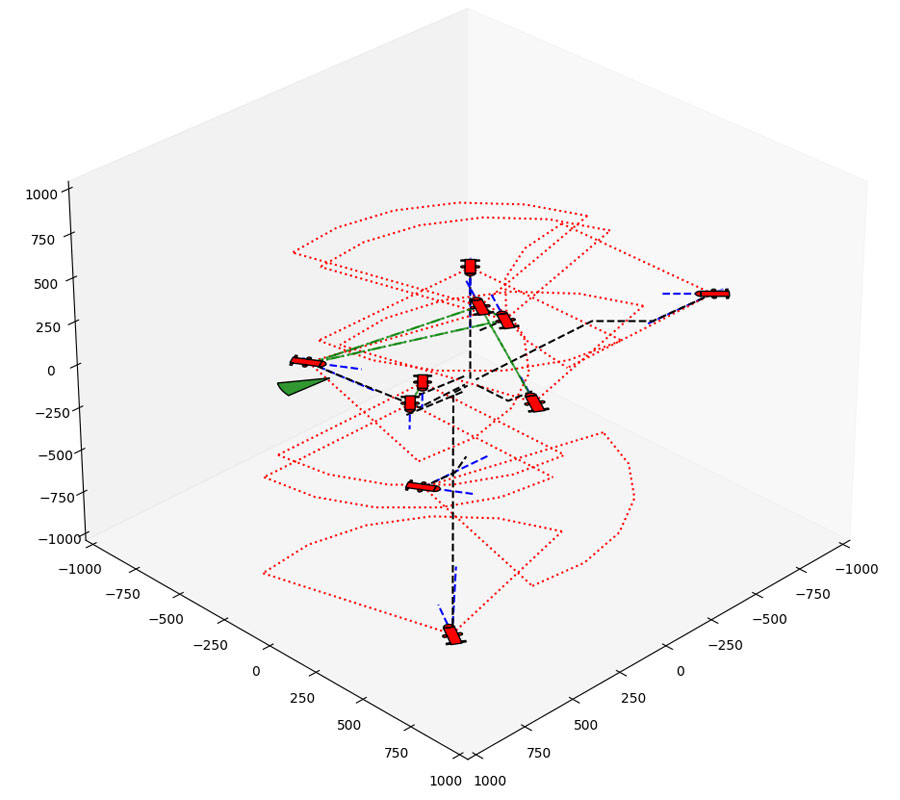
در تصویر ابتدایی اجرای مدل شبیهسازی، ۱۰ ربات هوشمند (نمایش داده شده با اشکال قرمز) بهصورت تصادفی در فضای سهبعدی توزیع شدهاند. نقطه سبز رنگ در مرکز نشاندهندهی هدف (ماهی) است که رباتها مأمور شناسایی و نزدیک شدن به آن هستند.
در این مرحله از شبیهسازی:
- رباتها هنوز هیچگونه حرکت هوشمند یا هماهنگی خاصی از خود نشان ندادهاند و در موقعیتهای اولیهای که به صورت تصادفی تولید شدهاند، قرار دارند.
- ناحیههای نیمدایرهای قرمز رنگ دایرههای ارتباطی یا ناحیهی حساسیت (sensing range) رباتها را نشان میدهند که مشخص میکند هر ربات در چه شعاعی قادر به دریافت اطلاعات از محیط یا همسایگان خود است.
- برخی از رباتها در محدودهی دید هدف قرار گرفتهاند و برخی هنوز ارتباطی با آن یا با یکدیگر ندارند.
- خطوط آبی جهتگیری اولیه رباتها را نشان میدهد، در حالی که هیچکدام هنوز حرکت معنیداری به سمت هدف نداشتهاند.
این تصویر نقطه شروع فرآیند بهینهسازی و تصمیمگیری گروهی است که در مراحل بعد، رفتار انطباقی آنها به مرور بر اساس الگوریتم ازدحامی و ارتباط جمعی تغییر میکند.
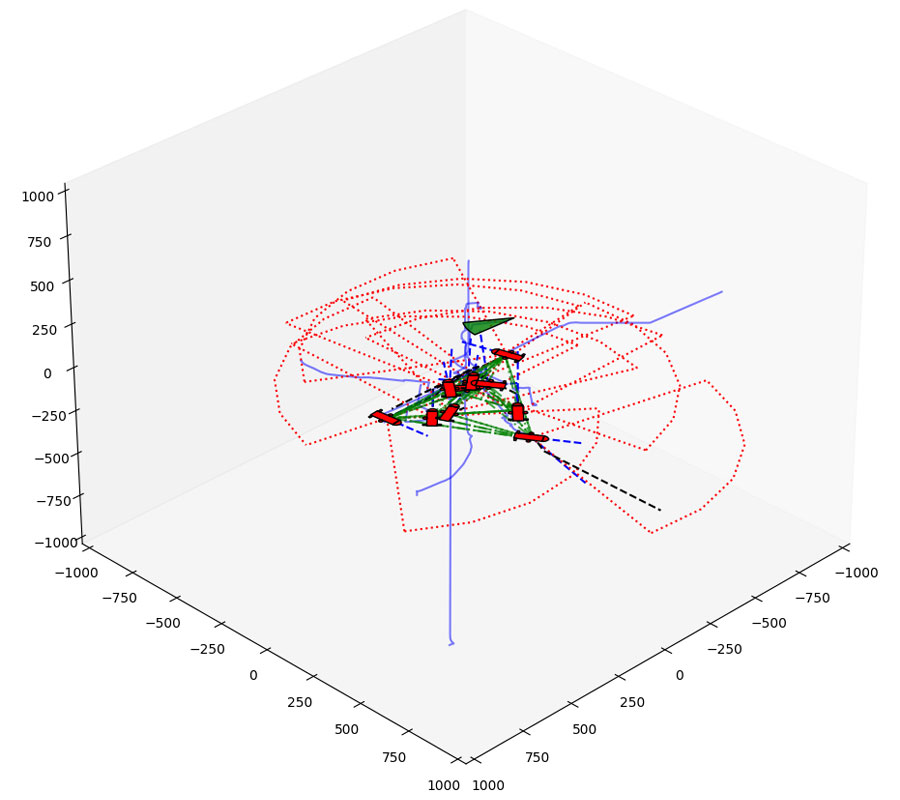
در بالا تصویر خروجی مراحل پایانی شبیه سازی آورده شده که با مقایسه این دو تصویر، میتوان به وضوح عملکرد الگوریتم AFSA در همگرا کردن رباتها به یک هدف یا نقطه مشترک را مشاهده کرد:
- همگرایی: تصویر اول (مرحله اولیه) نشاندهنده پراکندگی اولیه رباتها و شروع فرآیند جستجو است، در حالی که تصویر دوم (مرحله پایانی یا میانی پیشرفته) تجمع رباتها در یک نقطه را نشان میدهد. این همگرایی نشاندهنده موفقیت الگوریتم AFSA در هدایت رباتها به سمت یکدیگر یا یک هدف مرکزی است.
- رفتار ازدحامی: در تصویر دوم، خطوط سبز متراکم و تجمع رباتها نشاندهنده شکلگیری یک رفتار ازدحامی منسجم است که از اصول AFSA پیروی میکند. رباتها با برهمکنش با یکدیگر و با هدف، یک گروه هماهنگ را تشکیل دادهاند.
- پوشش محیط: خطوط آبی در تصویر اول میتوانند نشاندهنده پوشش محیطی توسط رباتها در طول مسیرشان باشند، حتی اگر هدف نهایی همگرایی باشد. رباتها از نقاط مختلف محیط شروع به حرکت کرده و به سمت هدف همگرا شدهاند.
- اثر ناحیه حسگر: مشاهده ناحیههای حسگر (قرمز نقطهچین) در هر دو تصویر، اهمیت قابلیتهای حسی رباتها را در AFSA برای تشخیص محیط و همسایگان نشان میدهد که برای تصمیمگیری در مورد حرکت بعدی ضروری است.
بطور کلی در این الگوریتم ربات ها بر اساس مکانیابی حسگری و توزیع سطح شایستگی عمل میکنند به بیان ساده تر با تعریف یک تابع توزیع شایستگی که تابعی از فاصله ربات ها با هدف و سایر رباتها و پارامتر شدت تاثیر گذاری هدف که منبع و مرجع این سطح است و دارای بیشترین مقدار میباشد و هرچه ربات ها به آن نزدیک تر شوند سطح شایستگی بیشتری را بدست میآورند و منجر به دنبال کردن بهینه هدف میشود میتوان به مقصود نهایی رسید.
در مرحله بعد به توسعه مدلی پرداخته شد که با تعریف سطح پتانسیل در محیط شبیه سازی و تعریف هدف به عنوان بیشترین وزن برای دنبال شدن هدف توسط رباتها به این مهم دست پیدا شد. تصور کنید کل محیط شبیه سازی شبیه یک ورقهی بشدت نازک است و هدف ربات ها مانند یک گلولهی بسیار سنگین روی این ورقه حرکت میکند و باعث ایجاد فرورفتگی روی سطح میشود و باعث سوق دادن ربات ها به سمت خود میشود.
به لحاظ تئوریک هر نقطه از فضای شبیه سازی براساس فاصله از هدف دارای یک سطح پتانسیل است که ربات با اندازه گیری سطح پتانسیل و گرادیان آن همواره به سمت پتانسیل بیشتر حرکت میکند که تصاویر خروجی این مدل نیز در ادامه مطالب ارائه شده است.
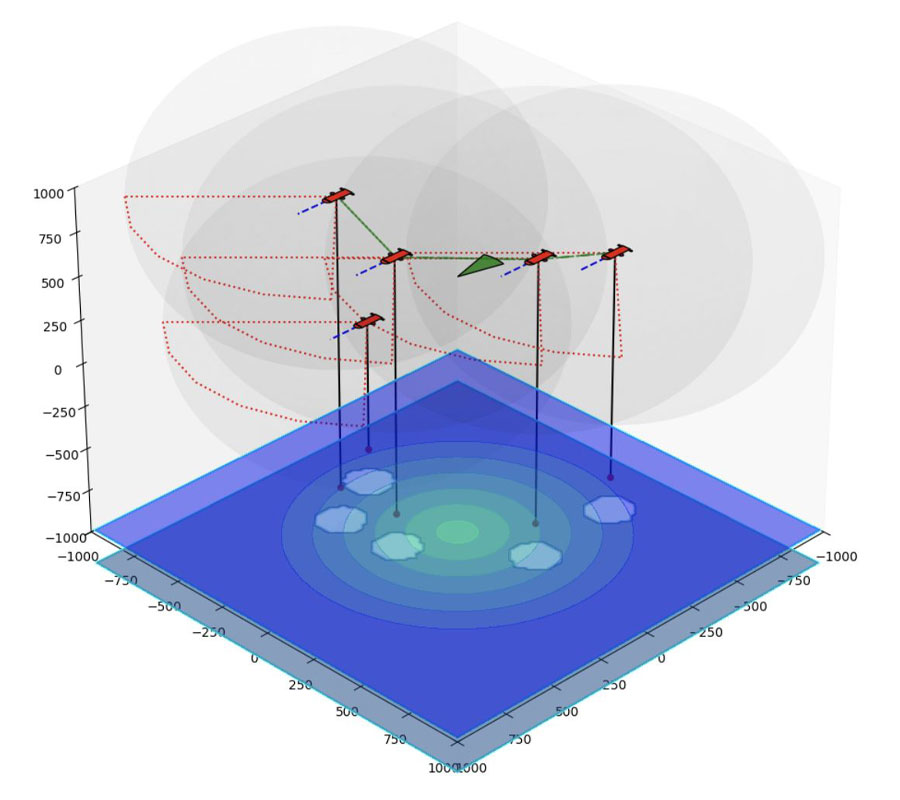
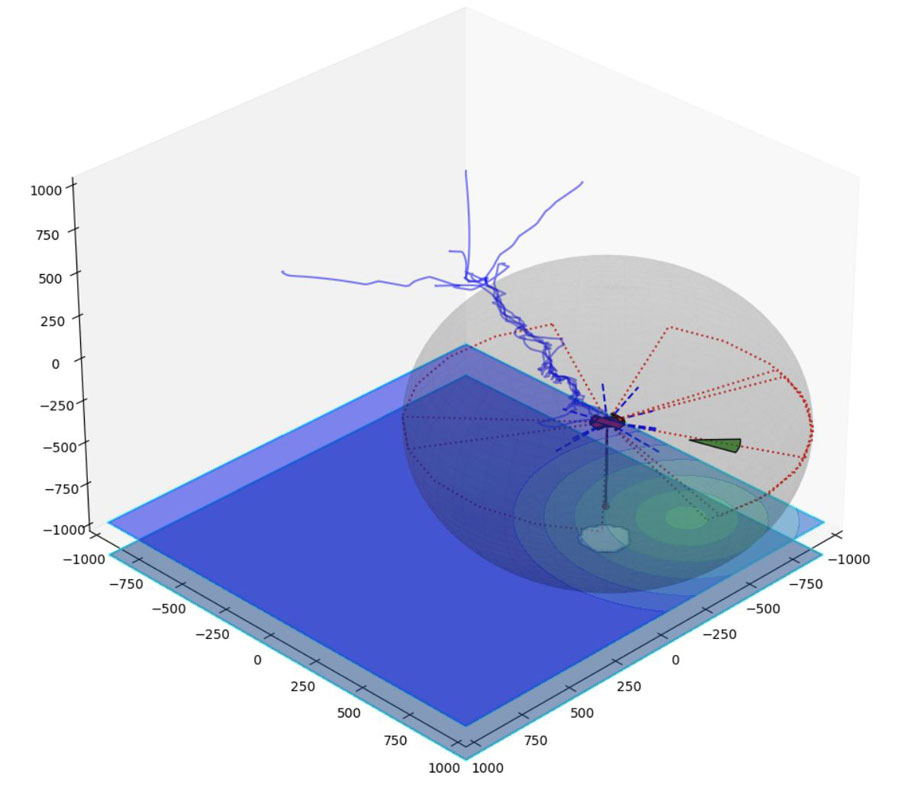
این تصاویر، خروجی شبیهسازی الگوریتم سطح پتانسیل را در یک محیط سهبعدی برای رباتهای جمعی نشان میدهند. در این رویکرد، محیط با یک تابع پتانسیل پوشانده میشود که رباتها با حرکت در جهت کاهش پتانسیل (یا شیب منفی) به سمت اهداف و دور از موانع حرکت میکنند. این روش به ویژه برای مسائل پوشش و مسیریابی در محیطهای پیچیده کاربرد دارد و همانطور که توضیح داده شد حوزههای سبز زنگ دارای بیشترین گرادیان و نشان دهنده حضور هدف در آن ناحیه است و در تصویر نخست از مراحل آغازین شبیه سازی رباتها هنوز به سمت هدف سوق داده نشدند ولی در مراحل پایانی شبیه سازی مدل عملکرد بسیار خوبی داشته است و در پایان این بخش به جمع بندی مطالب میپردازیم.
در عصر حاضر، سیستمهای رباتیک ازدحامی به عنوان یکی از پیشروترین حوزههای تحقیقاتی در علوم و مهندسی، نویدبخش راهحلهای خلاقانه و کارآمد برای چالشهای پیچیده در محیطهای گوناگون هستند. قلب تپنده این سیستمها، الگوریتمهای هوشمندی است که قادر به هماهنگی و کنترل تعداد زیادی از رباتهای مستقل هستند. ما به بررسی عمیق دو رویکرد اصلی در این زمینه، یعنی الگوریتم ازدحام ماهی مصنوعی (AFSA) و الگوریتم سطح پتانسیل، پرداختیم و تواناییهای منحصر به فرد هر یک را در هدایت و همگرایی رباتها در فضایی سهبعدی به تصویر کشیدیم.
الگوریتم AFSA، که ریشههای خود را در طبیعت و رفتار جمعی ماهیها دارد، با تکیه بر برهمکنشهای محلی و قوانین سادهای چون جستجو، تعقیب و ازدحام، توانایی قابل توجهی در همگرایی رباتها به یک هدف مشترک از خود نشان میدهد. این رویکرد، که به مدلسازی دقیق محیط وابسته نیست و ذاتاً به خطا مقاوم است، مسیری دلپذیر برای رباتها در محیطهای ناشناخته یا پویا فراهم میآورد. تصاویر شبیهسازی ما به وضوح نشان دادند که چگونه رباتها از نقاط پراکنده آغازین، با اتکا به همین برهمکنشهای محلی، به سمت یک نقطه مرکزی همگرا میشوند، که این خود شاهدی بر قابلیتهای بالای AFSA در ایجاد رفتارهای جمعی و همگرا است.
در مقابل، الگوریتم سطح پتانسیل با یک رویکرد کاملاً متفاوت، محیط را به یک میدان نیروی پتانسیل تبدیل میکند؛ جایی که اهداف به عنوان جاذبهها و موانع به عنوان دافعهها عمل میکنند. این روش، با ارائه مسیرهای هموار و قابلیت ذاتی در اجتناب از برخورد با موانع مشخص، برای مسائلی که نیاز به مسیریابی دقیق در محیطهای دارای ساختار شناخته شده دارند، بسیار کارآمد است. تحلیل شبیهسازیهای ما گواه این مدعاست که چگونه رباتها میتوانند با موفقیت در این میدانهای پتانسیل حرکت کنند، از موانع سهبعدی اجتناب ورزند و در نهایت به سمت نقاط پتانسیل پایین (اهداف) همگرا شوند. این قابلیت، به ویژه در کاربردهایی که امنیت و دقت مسیریابی در اولویت هستند، ارزشمند است.
با در نظر گرفتن پتانسیلهای بیکران رباتیک ازدحامی، آیندهای روشن برای کاربرد این مدلها متصور هستیم. از عملیاتهای جستجو و نجات در مناطق فاجعهزده و بازرسیهای هوشمندانه زیرساختهای وسیع، تا مدیریت ترافیک خودران شهری و کاوشهای علمی در سیارات دوردست یا اعماق اقیانوسها، رباتهای ازدحامی میتوانند با بهرهگیری از هوش جمعی و تواناییهای مسیریابی هوشمند، تحولی عظیم ایجاد کنند. آنها قادر خواهند بود کارهایی را انجام دهند که از توانایی یک ربات واحد فراتر است، و با مقیاسپذیری و مقاومت به خطای ذاتی خود، سیستمهایی بسیار قابل اعتماد و منعطف را رقم بزنند.
برای پیشبرد این حوزه و غلبه بر چالشهای موجود، پیشنهاد میشود تا در کارهای آتی، به رویکردهای ترکیبی میان این مدلها پرداخته شود؛ جایی که مزایای AFSA و الگوریتم پتانسیل در کنار هم به کار گرفته شوند. به عنوان مثال، AFSA میتواند برای تصمیمگیریهای سطح بالاتر گروهی و الگوریتم پتانسیل برای مسیریابی محلی و اجتناب از موانع مورد استفاده قرار گیرد. علاوه بر این، پژوهش بر روی روشهای نوآورانه برای رفع مشکل “دامهای محلی” در میدانهای پتانسیل، پیادهسازی مدلها در سختافزار واقعی با در نظر گرفتن محدودیتهای فیزیکی، و ادغام هوش مصنوعی پیشرفته نظیر یادگیری تقویتی برای بهبود تطابقپذیری رباتها با محیطهای کاملاً پویا و ناشناخته، از جمله مسیرهای تحقیقاتی امیدبخش برای آینده خواهند بود. این گامها، رباتهای ازدحامی را از حوزه شبیهسازی فراتر برده و به ابزارهایی قدرتمند و عملی در دنیای واقعی تبدیل خواهند کرد.
آخرین مقالات

